
CUDA简明介绍
随着AI的兴起,老黄的计算卡一卡难求,在深度学习领域老黄已经几乎事实上达到了垄断的地位。而让老黄成为AI领域那个“卖铲子”的正是CUDA,或者说是围绕CUDA诞生的一系列软件生态。
今天就用CUDA实现一个矩阵乘法来简单介绍一下CUDA是如何让GPU突破摩尔定律的以及为什么在AI训练中是如此重要。
CUDA是什么
CUDA全称Compute Unified Device Architecture,是老黄推出的API,方便开发者调用NVIDIA GPU用来进行大规模并行计算。
老黄在Clang编译器的基础上拓展开发了针对CUDA的编译器NVCC,所以NVCC支持大部分C/C++语法特性同时支持针对CUDA的拓展语法。
如何搭建CUDA编程环境
由于NVIDIA与开源社区一向水火不容,所以导致N卡在Linux的兼容性不说完美无缺至少也是丝毫没有,当然这两年由于NVIDIA的数据中心业务水涨船高,老黄也逐渐开源了部分GPU驱动相比于以前已经是好很多了。但是目前来说体验最好的还是用wsl2搭配vscode,不需要折腾驱动,几乎是一键安装,同时NVIDIA也提供了docker镜像方便部署维护,具体可以看上一篇配置wsl2的文章。
CUDA实现矩阵乘法
计算机架构
计算流程
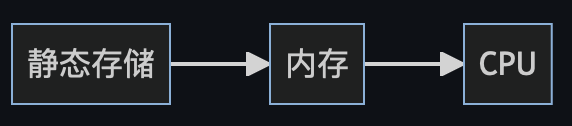
在使用CUDA编程前,我们需要对计算机架构需要有一个了解。
一般来说计算机计算,遵循如下流程
但是当GPU加入进来后的异构计算流程则有一定的区别
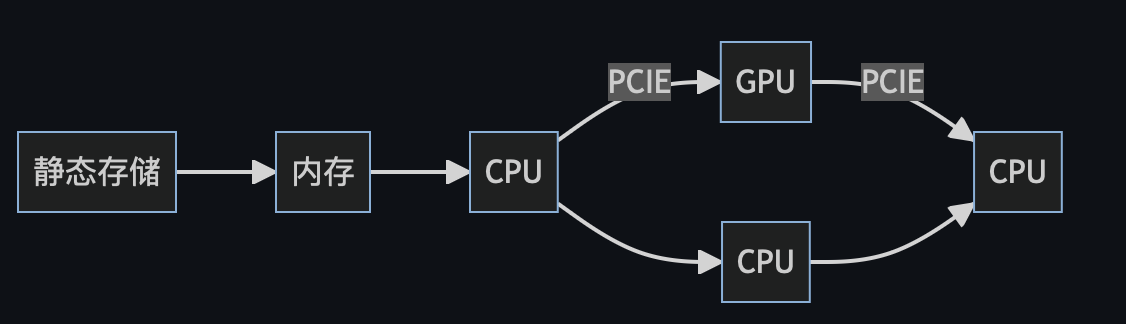 在程序运行过程中可以理解为CPU与GPU是异步的,两者通过
在程序运行过程中可以理解为CPU与GPU是异步的,两者通过PCIE通道通信,CPU调用kernel函数后后并不会等待GPU计算结束再继续而是直接继续运行。
GPU架构
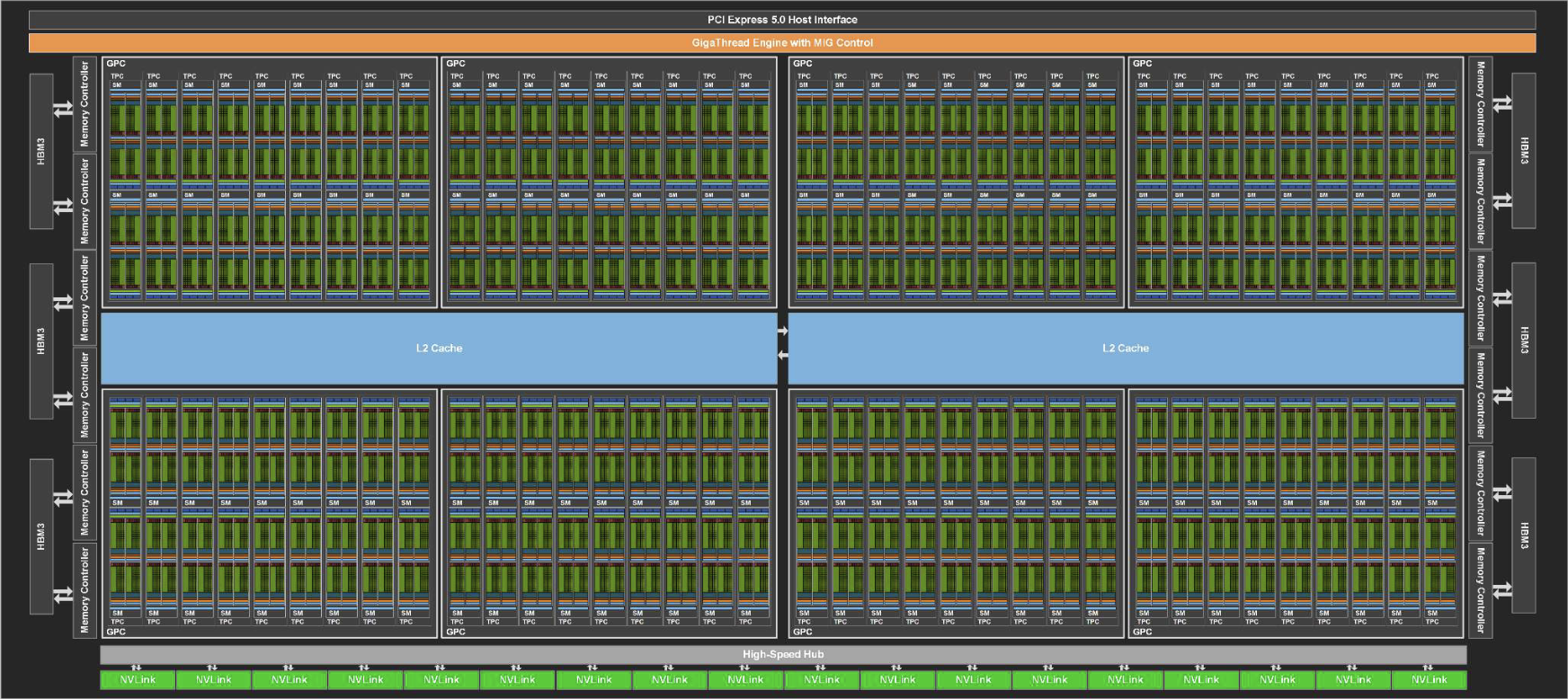 我们这里简单介绍一下GPU的架构,上图是H100的架构图。整个H100有8组GPC,每组GPC有9组TPC,每组TPC又有两组SM,而每组SM又有144个CUDA Tensor,共有18432个CUDA Tensor以及两组24MB的L2缓存。同时由于H100是计算专用卡,所以老黄只留了一组光栅单元,打游戏是基本没戏了。
我们这里简单介绍一下GPU的架构,上图是H100的架构图。整个H100有8组GPC,每组GPC有9组TPC,每组TPC又有两组SM,而每组SM又有144个CUDA Tensor,共有18432个CUDA Tensor以及两组24MB的L2缓存。同时由于H100是计算专用卡,所以老黄只留了一组光栅单元,打游戏是基本没戏了。
这里每个CUDA Tensor都可以看成是一个CPU核心,但是相比于CPU核心CUDA Tensor不能做复杂的逻辑运算,适合做大规模的并行计算,尤其是适合做矩阵运算。
代码实现
我这里使用CUDA C/C++来实现矩阵的乘法。
|
|
我们首先定义一下矩阵的大小。
接着用malloc分配一下内存以及利用随机函数给矩阵赋值
|
|
这里我把矩阵数值保存到文本中,方便查看。
由于我们需要将host即主机上的数据复制到device即GPU上,所以我们也需要在GPU上分配内存
|
|
这里用到了CUDA C/C++两个API
cudaMalloc用来在GPU上分配内存cudaMalloc(*ptr,size)cudaMemcpy用来将host上的内存数据复制到device中
接着我们就需要写kernel函数了,即在device上运行的函数
|
|
这里有几个要点
- 这里的
__global__是CUDA C/C++的拓展语法,表明函数是在GPU上执行的,相对的还有__host__和__device__关键词,分别表CPU调用函数(这里__host__一般不显示声明)以及在__global__函数中调用host函数。 - 重要的一点所有的
kernel函数都必须要用void即没有返回值。 - 与常规的计算流程不同,CUDA并行计算是将对矩阵的索引变为对CUDA线程的索引,这极大的加速了矩阵的计算。
接着我们需要为kernel函数手动分配线程数
|
|
这里同样用到了拓展语法分别是dim3数据类型以及<<<gridDim, blockDim>>>
dim3是用来保存分配线程数的数据类型,这里要简单介绍一下CUDA的线程概念,分别是grid、block以及thread,每个grid中可以包含$N_x \times N_y \times N_z$个block同样每个block也可以包含$X \times Y \times Z$个线程,这样我们需要对每个线程进行索引,简单来说就可以想象成将一个二维的矩阵映射到一维进行索引。同时也要注意,在进行索引时不能超出所分配的线程数,否则会发生越界。<<<gridDim, blockDim>>>这个拓展语法则相对好理解的多,即对matrixMul这个函数分配了对应的线程数。
最后当GPU计算完成,我们还需要将GPU的计算结果同步到CPU中(养成释放内存的好习惯
|
|
这里同样是利用cudaMemcpy这个函数,将device的数据复制到host中,这里并没有显示的用cudaDeviceSynchronize这个API让CPU等待GPU计算完成再计算,cudaMemcpy隐含了同步的操作。
至此我们已经完成了利用CUDA实现矩阵乘法的流程。如果想看完整代码可以移步我的代码仓库
总结
利用CUDA编程的整体思路还是想当固定的,即为device分配内存,将host数据拷贝到device中,device计算,完成后将device计算结果拷贝到host,最后释放内存。
当然本文写的也是相当简化的一个步骤,CUDA编程相当复杂涉及到很多计算机架构和GPU硬件的知识,比如在涉及到需要经常读取的数据我们就需要用__share__关键词将数据存储到GPU的共享内存,同样在并行求和时常用的reduce算法涉及到数据在线程与线程间归并以及数据竞争的问题。
CUDA编程相较于传统CPU的串行计算有很大的不同,需要我们用不同的视角看问题,同时看到利用CUDA进行并行计算获得远超CPU串行计算的性能时,获得的成就感还是相当让人兴奋的。